

全國服務熱線:
180-9257-8363
180-9257-8363


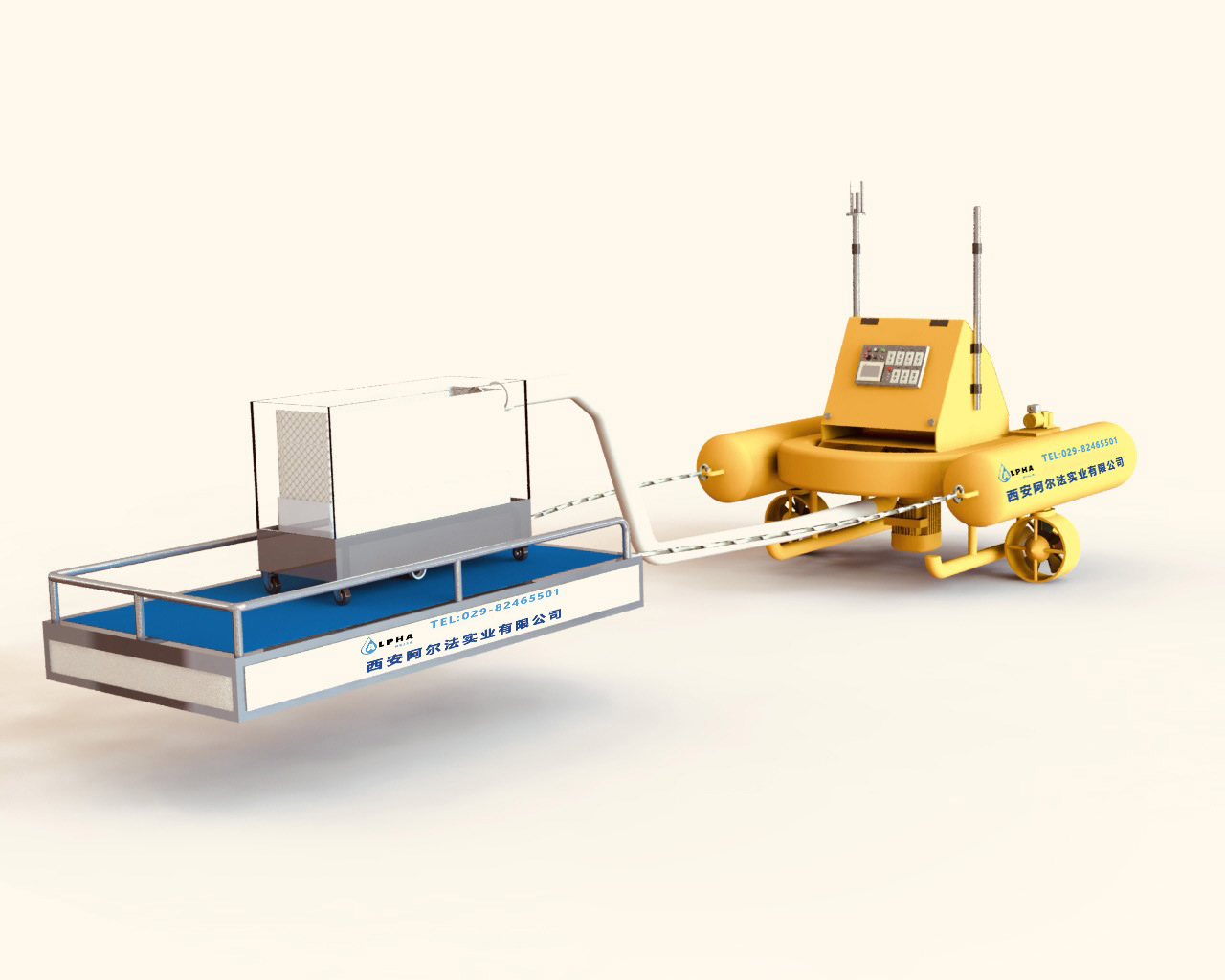
水下機器人通常能夠分成兩個大類:一類是有纜水下機器人,習氣稱為遙控潛水器(RemoteOperatedVehicle,簡稱);另一種是無纜水下機器人,習氣稱為自治潛水器(AutonomousUnderwaterVehicle,簡稱AUV)。除此之外,按運用的目的分,有水下查詢機器人(觀測、測量、試驗材料的收集等)和水下作業機器人(水下焊接、擰管子、水下建筑、水下切割等作業);按活動場所分,有海底機器人和水中機器人。【了解詳情】
常情況下,我們將清淤機器人的速度控制在.大速度的60-90%。因為高速,功率和運行成本增加。次之,污泥在設備轉鼓上的磨損增加,這將減少轉鼓的使用時間。高速會導致設備劇烈振動,這會使連接器長時間松動,并使維護工作更加麻煩。【了解詳情】

河道進行清淤是很重要的,能有效的幫助治理水環境,下面西安阿爾法清淤機器人就來給大家說說河道清淤的意義:【了解詳情】

今日,西安阿爾法水面保潔機器人廠家就來給大家帶來國內外對河流富營養化治理與維護的方法介紹。【了解詳情】
水面保潔機器人能夠適應各類水面水上漂浮垃圾收纜、吸除、切割、濾除、配備干涉分離,擁有很多的優勢,那么它是由哪些配件組成的呢?【了解詳情】

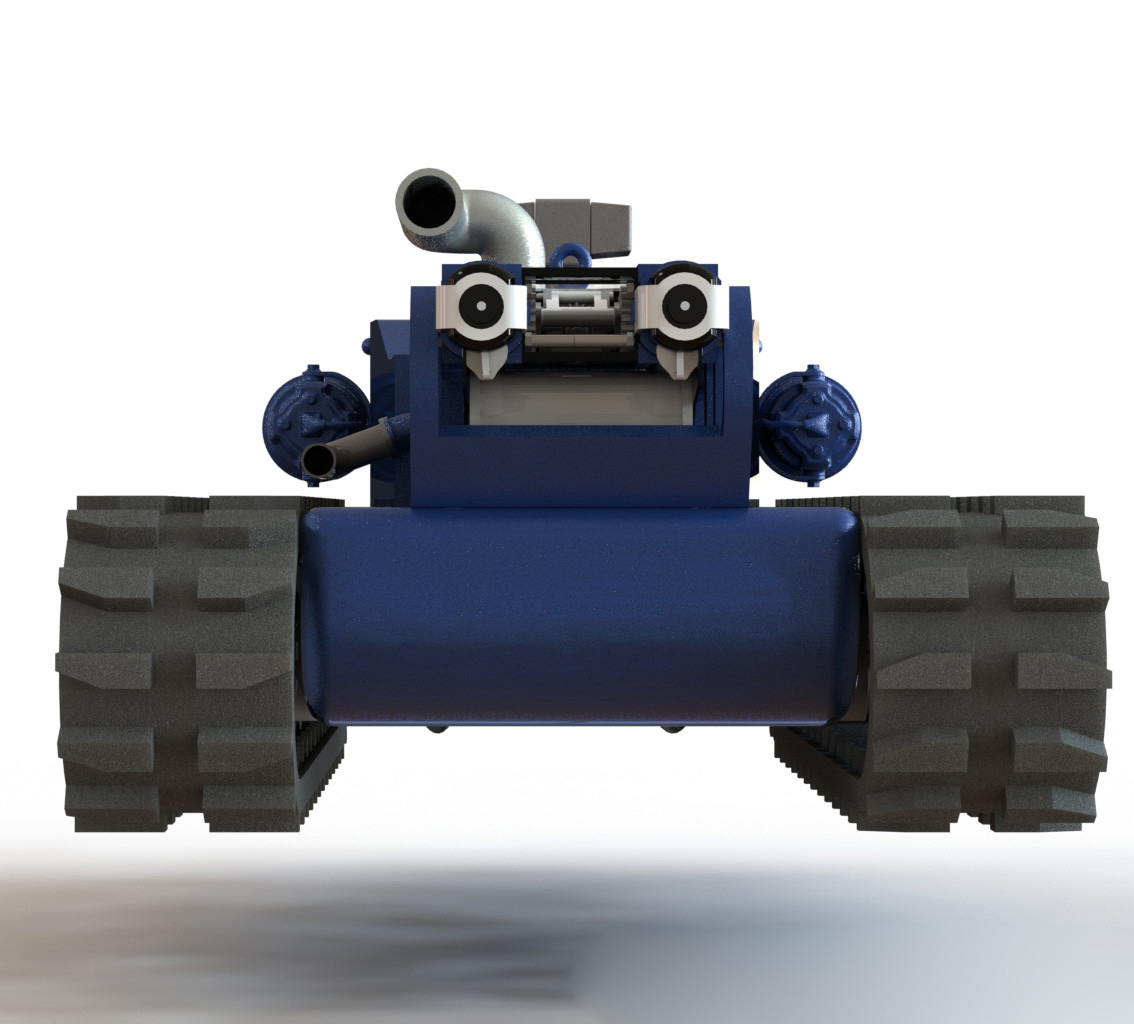
水下機器人運動安穩性是確保水下機器人安全可靠作業的重要,而使水下機器人受擾后自動返回起始運動狀態是安穩性操縱研討的主要內容,因此研討安穩性控制方法就顯得非常重要了。【了解詳情】




